
系统介绍
隧道自动巡检系统将先进的机器人技术和无损传感的物联网技术相结合,长期、实时、空间上自由连续地获得隧道内部的设备运行状态信息,分析包括隧道结构状态、设备工作状态、车辆行驶状态、路面状态、隧道气象状态在内的各种状态特征,以便了解隧道运行中因损伤或者退化而造成的改变,并利用诊断方法判断损伤的发生、位置、程度,对隧道正常运行健康状况做出评估,在危及隧道结构安全性能的临界点到来之前提早发现异常,为隧道在特殊气候、交通条件下或隧道运行状况严重异常时触发预警信号,为隧道的维修、养护与管理决策提供依据和指导。
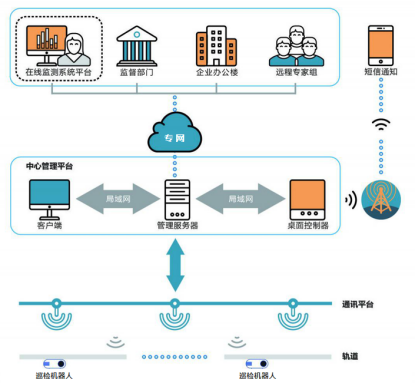 系统架构图
系统架构图
系统组成
隧道自动巡检系统
由移动机器人子系统,传感子系统,监控管理子系统,定位子系统,紧急救援子系统组成。
移动机器人子系统
主要包括行进模组、动力模组、通讯模组、定位模组、控制模组五大基础子系统,这五大子系统是保证交通机器人运行的基础,使其能延隧道自由运动,便于收集交通隧道内部运行过程中产生的各种数据。
传感子系统
包括图像采集,声音传感、温湿度传感、危害气体传感、红外热成像传感、超声波传感等多种传感方式,是隧道感知的重要途径。
监控管理子系统
主要负责对传感子系统收集上来的数据进行分析处理及存储,为后续大数据分析提供基础数据,同时以合适的方式呈现给用户。
定位子系统
主要负责移动机器人本体的定位工作,跟踪本体的移动位置,确定重要的巡检位置,以便巡检工作无偏差。
紧急救援子系统
在监测到烟雾及明火的时候,呼叫灭火机器人(另配),并根据巡检机器人提供的火灾位置信息,第一时间赶赴火灾地点进行应急消防工作。灭火机器人搭载有超细干粉灭火器,满足隧道的灭火要求。
系统组成
视频监控功能
智慧隧道机器人可实现可见光与红外视频图像采集功能,机器人可自动移动到指定位置,控制云台自由转动,拍摄隧道内各种设备高清图像和红外热成像,并将采集到的信息经无线局域网实时传输到主控室,在主控室的工作人员便可根据图像判断出隧道内的各种设备是否安全。
巡航测温功能
智能机器人搭载的红外热像仪,根据红外热成像原理,能准确检测设备运行时的表面温度。同时在后台监控界面上,准确显示当前拍摄设备的运行温度,如果温度值超出预先设定的阈值,则会发出警报。采用巡航测温的方式实现隧道测温的全覆盖,机器人一边沿着隧道行走,一边用红外热像仪对设备进行温度检测。不仅可以实现隧道测温的全覆盖,而且能有效提高机器人在隧道内巡检的效率。
环境监测功能
巡检机器人携带有气体探测器与温湿度传感器,可以随时对隧道内的空气环境与温湿度进行分析并得出结果,同时将结果反馈给主控室的工作人员,也可人工设置报警的限值,包括低温、高温报警限值,湿度报警限值,气体浓度报警限值,超过限值后立即声光报警,以防止由于工作人员对隧道环境的误判,造成生命危险。
双向语音对讲功能
当隧道内设备发生现场工作人员不能解决的非常规问题时,通过综合隧道智能机器人的视频设备和语音设备可实现现场工作人员与远端专家的即时交互,由专家来指导和监督现场工作人员,实现正确规范的操作,有助于问题的现场解决。此时,机器人将伴随现场的工作人员进行工作。
自主巡检功能
机器人可进行定时巡检、定点巡检、定任务巡检等多种巡检方式。常用的定点巡检可以根据指定的路径和指定的巡检目标点进行自动匀速巡检,只需要设定巡检路径并启动自动巡检即可使机器人自动完成一次巡检。机器人搭载高清摄像机、高灵敏红外热成像仪、拾音器、有害气体传感器、烟雾传感器、温湿度传感器、光照传感器等多种检测设备,自动对各种设备如电缆接头、接地箱、集水井、隧道井体、各种给排水管道等隧道内设施以及辅助设备的外观检查、温度诊断、气体检测等工作。
遥控巡检功能
除机器人自动进行例行巡检外,还可以通过人工遥控巡检的方式对机器人进行实时遥控。该项应用模式适用于运维人员以及管理单位需要对某类设备的状态进行锁定与监测,尤其对于在机器人自主巡检过程中如检测到设备、环境状态异常并向运维人员告警时,运维人员可以在第一时间操控机器人快速到达异常设备位置,及时对异常设备进行查看并核实报警信息,以便迅速制定响应策略。
应急处理功能
机器人在日常巡视过程中,当检测到隧道内环境、设备、安防情况等出现异常或出现火灾、管道爆裂、人员伤亡等事故时,能迅速做出反应并发出警报,锁定设备故障和事故发生所在位置,通知后台运维人员及时采取措施。
垂直爬坡功能
隧道在设计过程中,会遇到倒虹口设计,该类设计导致机器人需要保证可以大角度爬坡能力。本方案中,若遇到此情况,会在爬坡处安装金属齿条结构,机器人通过齿轮齿条结构设计,可以平稳安全的实现爬坡。
火灾监测与消防
智能机器人除了搭载有红外热像仪,还搭载有烟雾检测设备,可协同对隧道内的火灾进行监控预警。当机器人发现火源后,立即发出警报,提醒后台人员采取应急措施,同时调动系统配套的消防机器人。消防机器人根据巡检机器人提供的火灾位置信息,第一时间赶赴火灾地点进行应急消防工作。灭火机器人搭载有超细干粉灭火器,满足电力隧道的灭火要求。
自身安全防护功能
智能机器人采用超声波停障系统,对障碍物和隧道内工作人员进行探测,遇到障碍会停障并报警。同时在结构上增加防护,防止碰撞造成人员或者设备损伤,与超声波停障系统构筑双重安全保障,在超声波停障系统失效情况下防止与障碍物的激烈碰撞,并进行系统安全报警并在明显位置安装有闪动警示灯,提醒隧道内工作人员注意。
自主充电功能
挂轨式智慧隧道机器人本体自带电池电量检测电路,且可人工设置电量报警下限,一旦机器人检测到电池电量低于设置值时则会自动停止当前巡检任务,同时发出警报,之后自主运行到充电点进行充电。